Ansteuerung eines Bugstrahlruders
Im 212 habe ich ein Bugstrahlruder eingebaut. Wollte ich von Anfang an haben, denn so etwas hatte ich auch in meinem ersten 212 drin. Recht einfach zu bauen und ziemlich effektiv. Das Bugstrahlruder wird von einem kleinen Brushless angetrieben. Der dazu notwendige Regler ist ein kleiner Afro Regler vom Hobbyking:
https://hobbyking.com/en_us/afro-20a-multi-rotor-esc-opto-simonk-firmware.html?___store=en_us
Zum umprogrammieren auf die simonk Software braucht man noch den Adapter:
https://hobbyking.com/en_us/afro-esc-usb-programming-tool.html?___store=en_us
und die Lazyzero Software:
http://lazyzero.de/en/modellbau/kkmulticopterflashtool/start
Wurde aber alles schon an anderer Stelle beschrieben, daher nicht nochmal von vorne ;-).
Natürlich wollte ich eine Art Automatismus haben, mit dem ich das Bugstrahlruder ansteuere ohne einen separaten Kanal zu verschwenden. Grundsätzlich kann man natürlich den Regler parallel zum Seitenruer anklemmen, aber dann läuft das Bugstrahlruder die ganze Zeit mit, braucht Strom und ist bekanntlich bei hoher Fahrt nicht wirksam. Um das alles zu umgehen habe ich einen PICAXE so programmiert, dass er nur bei kleiner Fahrstufe die Seitenruderimpulse durchlässt. Man kann also quasi im Stand mit dem Seitenruder das Bugstrahlruder ansteuern ohne Benutzung eines zusätzlichen Kanals.
Das die PICAXE Chips bei Einlesen eines Impulses als auch bei der Ausgabe problematisch im Zusammenhang mit Servos sein können, kann man an ein paar Parametern rumschrauben um den Funktion des Programms zu optimieren:
Es gibt unten im Programm eine Pause 20. Hier kann man den Wert verändern wenn der Regler stockt.
Die Case Werte definieren die Schaltschwellen an denen der Chip das Seitenruder durchschalten soll oder nicht. Könnte man natürlich auch elegant mit Variablen am Anfang des Programms erledigen, aber ein bisschen sollt ihr ja auch selbst machen.
Zu guter Letzt kann man noch den disconnect Befehl am Anfang des Programms auskommentieren, dann muss man aber zu umprogrammieren beim nächsten Mal die Spannung zuschalten nachdem man den Programm Knopf gedrückt hat.
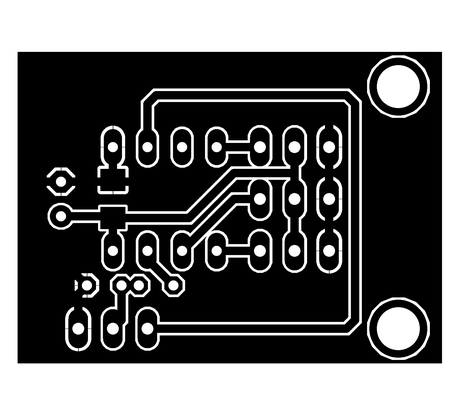
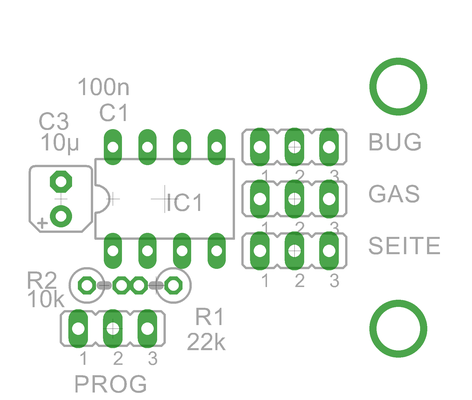
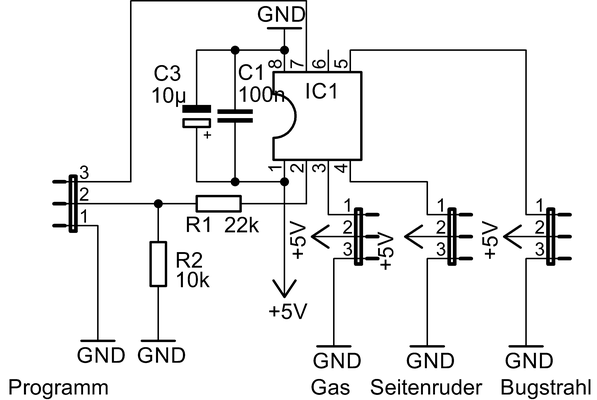
Ich habe auch eine kleine Platine/Schaltplan entworfen, aber das kann man genauso schnell auf einer Lochrasterplatine aufbauen.
Viel Spaß beim Nachbau
Das Programm
;bugstrahlruder mit 08m2
;seite an pin c.3, gas an pin c.4, ausgang an pin c.2
;zuerst wird brushlessregler mit mittelstellung initialisiert. brushlessausgang folgt dem Seitenruder
;wenn gas bestimmten wert uebersteigt wird brushlessausgang abgeschaltet
;case werte an fernbedienung anpassen
#picaxe 08m2
sertxd ("bugstrahlruder mit 08m2",cr,lf) ;text wird bei einschalten zur identifizierung des chips gesendet
disablebod
;disconnect '
symbol brushlessregler = c.2 'ausgang bugstrahlruder
symbol gas = c.3 'seitenruder
symbol seite = c.4 'gasknueppel
symbol throt = b0 'gaswert
symbol mitte = b1 'mittelstellung
symbol steuer = b2 'steuerungswert
init:
servo brushlessregler, 75
mitte = 150
servopos brushlessregler, mitte ;servo initialisieren
pause 2000 ;bisschen warten
start:
gosub lesen ;werte vom empf?nger lesen
select case throt ;und entscheiden
case 80 to 139 ;zu niedrig 0,8-1,39ms
servo brushlessregler, mitte ;bugstrahlruder mittelstellung
case 140 to 160 ;langsame fahrt 1,4-1,6ms
steuer = steuer max 175 min 115 ;durchschalten des seitenruders mit maximaler begrenzung
servo brushlessregler, steuer
case 161 to 200 ;zu hoch 1,61-2ms
servo brushlessregler, mitte ;bugstrahlruder mittelstellung
endselect
pause 20 ;wert ggfs an fernbedienung anpassen
goto start
lesen:
pulsin gas,1,throt ;gas lesen
pulsin seite,1,steuer ;seitenruder lesen
return
Bilder
Die folgenden Bilder gehören zu einem Kombibaustein, bestehend aus Bugstrahlrudersteuerung und Spannungsüberwachung. Der Baustein wurde im 212 eingebaut.
Der Probeaufbau auf den ersten beiden Bildern entspricht natürlich NICHT dem gezeigten Layout